There are limitations with `async/await` (no GAT) requiring the value to
be cloned on receive. The `poll` based API is not currently exposed.
This makes the `Clone` requirement explicit.
This exposes `std{in, out, err}` under io feature by moving
`fs::blocking` module into `io::blocking`.
As `fs` feature depends on `io-trait` feature, `fs` implementations can
always access `io` module.
It no longer supports executing !Send futures. The use case for
It is wanting a “light” runtime. There will be “local” task execution
using a different strategy coming later.
This patch also renames `thread_pool` -> `threaded_scheduler`, but
only in public APIs for now.
In an effort to reach API stability, the `tokio` crate is shedding its
_public_ dependencies on crates that are either a) do not provide a
stable (1.0+) release with longevity guarantees or b) match the `tokio`
release cadence. Of course, implementing `std` traits fits the
requirements.
The on exception, for now, is the `Stream` trait found in `futures_core`.
It is expected that this trait will not change much and be moved into `std.
Since Tokio is not yet going reaching 1.0, I feel that it is acceptable to maintain
a dependency on this trait given how foundational it is.
Since the `Stream` implementation is optional, types that are logically
streams provide `async fn next_*` functions to obtain the next value.
Avoiding the `next()` name prevents fn conflicts with `StreamExt::next()`.
Additionally, some misc cleanup is also done:
- `tokio::io::io` -> `tokio::io::util`.
- `delay` -> `delay_until`.
- `Timeout::new` -> `timeout(...)`.
- `signal::ctrl_c()` returns a future instead of a stream.
- `{tcp,unix}::Incoming` is removed (due to lack of `Stream` trait).
- `time::Throttle` is removed (due to lack of `Stream` trait).
- Fix: `mpsc::UnboundedSender::send(&self)` (no more conflict with `Sink` fns).
This patch started as an effort to make `time::Timer` private. However, in an
effort to get the build compiling again, more and more changes were made. This
probably should have been broken up, but here we are. I will attempt to
summarize the changes here.
* Feature flags are reorganized to make clearer. `net-driver` becomes
`io-driver`. `rt-current-thread` becomes `rt-core`.
* The `Runtime` can be created without any executor. This replaces `enter`. It
also allows creating I/O / time drivers that are standalone.
* `tokio::timer` is renamed to `tokio::time`. This brings it in line with `std`.
* `tokio::timer::Timer` is renamed to `Driver` and made private.
* The `clock` module is removed. Instead, an `Instant` type is provided. This
type defaults to calling `std::time::Instant`. A `test-util` feature flag can
be used to enable hooking into time.
* The `blocking` module is moved to the top level and is cleaned up.
* The `task` module is moved to the top level.
* The thread-pool's in-place blocking implementation is cleaned up.
* `runtime::Spawner` is renamed to `runtime::Handle` and can be used to "enter"
a runtime context.
It is a more common use case that is to simply cause a delay for an amount of time.
I think it is more appropriate to show off `delay_for` in the example rather than `delay` that is useful only for less common use cases.
Fixes a bug in the thread-pool executor related to shutdown
concurrent with a task that is self-notifying. A `loom` test is
added to validate the fix.
Additionally, in anticipation of the `thread_pool` module being
switched to private, tests are updated to use `Runtime` directly
instead of `thread_pool`. Those tests that cannot be updated
are switched to unit tests.
The `Executor` trait is sub-optimal as it forces a `Box<dyn Future>` to
spawn. Instead, `tokio::spawn` delegates to the specific runtime
implementation set for the current execution context.
`TypedExecutor`, while useful, has seen limited adoption. As such, it is
removed from `tokio` proper. Moving it to `tokio-util` is a possibility
that can be explored as follow up work.
Simplify Tokio's runtime construct by combining both Runtime variants
into a single type. The execution style can be controlled by a
configuration setting on `Builder`.
The implication of this change is that there is no longer any way to
spawn `!Send` futures. This, however, is a temporary limitation. A
different strategy will be employed for supporting `!Send` futures.
Included in this patch is a rework of `task::JoinHandle` to support
using this type from both the thread-pool and current-thread executors.
The compat crate is moved to https://github.com/tokio-rs/tokio-compat.
This allows pinning it to specific revisions of the Tokio git
repository. The master branch is intended to go through significant
churn and it will be easier to update the compat layer in batches.
## Motivation
The `futures` crate's [`compat` module][futures-compat] provides
interoperability between `futures` 0.1 and `std::future` _future types_
(e.g. implementing `std::future::Future` for a type that implements the
`futures` 0.1 `Future` trait). However, this on its own is insufficient
to run code written against `tokio` 0.1 on a `tokio` 0.2 runtime, if
that code also relies on `tokio`'s runtime services. If legacy tasks are
executed that rely on `tokio::timer`, perform IO using `tokio`'s
reactor, or call `tokio::spawn`, those API calls will fail unless there
is also a runtime compatibility layer.
## Solution
As proposed in #1549, this branch introduces a new `tokio-compat` crate,
with implementations of the thread pool and current-thread runtimes that
are capable of running both tokio 0.1 and tokio 0.2 tasks. The compat
runtime creates a background thread that runs a `tokio` 0.1 timer and
reactor, and sets itself as the `tokio` 0.1 executor as well as the
default 0.2 executor. This allows 0.1 futures that use 0.1 timer,
reactor, and executor APIs may run alongside `std::future` tasks on the
0.2 runtime.
### Examples
Spawning both `tokio` 0.1 and `tokio` 0.2 futures:
```rust
use futures_01::future::lazy;
tokio_compat::run(lazy(|| {
// spawn a `futures` 0.1 future using the `spawn` function from the
// `tokio` 0.1 crate:
tokio_01::spawn(lazy(|| {
println!("hello from tokio 0.1!");
Ok(())
}));
// spawn an `async` block future on the same runtime using `tokio`
// 0.2's `spawn`:
tokio_02::spawn(async {
println!("hello from tokio 0.2!");
});
Ok(())
}))
```
Futures on the compat runtime can use `timer` APIs from both 0.1 and 0.2
versions of `tokio`:
```rust
use std::time::{Duration, Instant};
use futures_01::future::lazy;
use tokio_compat::prelude::*;
tokio_compat::run_03(async {
// Wait for a `tokio` 0.1 `Delay`...
let when = Instant::now() + Duration::from_millis(10);
tokio_01::timer::Delay::new(when)
// convert the delay future into a `std::future` that we can `await`.
.compat()
.await
.expect("tokio 0.1 timer should work!");
println!("10 ms have elapsed");
// Wait for a `tokio` 0.2 `Delay`...
let when = Instant::now() + Duration::from_millis(20);
tokio_02::timer::delay(when).await;
println!("20 ms have elapsed");
});
```
## Future Work
This is just an initial implementation of a `tokio-compat` crate; there
are more compatibility layers we'll want to provide before that crate is
complete. For example, we should also provide compatibility between
`tokio` 0.2's `AsyncRead` and `AsyncWrite` traits and the `futures` 0.1
and `futures` 0.3 versions of those traits. In #1549, @carllerche also
suggests that the `compat` crate provide reimplementations of APIs that
were removed from `tokio` 0.2 proper, such as the `tcp::Incoming`
future.
Additionally, there is likely extra work required to get the
`tokio-threadpool` 0.1 `blocking` APIs to work on the compat runtime.
This will be addressed in a follow-up PR.
Fixes: #1605Fixes: #1552
Refs: #1549
[futures-compat]: https://rust-lang-nursery.github.io/futures-api-docs/0.3.0-alpha.19/futures/compat/index.html
It is hard to maintain features list manually, so use cargo-hack's
`--each-feature` flag. And cargo-hack provides a workaround for an issue
that dev-dependencies leaking into normal build (`--no-dev-deps` flag),
so removed own ci tool.
Also, compared to running tests on all features, there is not much
advantage in running tests on each feature, so only the default features
and all features are tested.
If the behavior changes depending on the feature, we need to test it as
another job in CI.
I need this to implement SMTP pipelining checks. I mostly need to
flush my send buffer when the read buffer is empty before waiting for
the next command.
A step towards collapsing Tokio sub crates into a single `tokio`
crate (#1318).
The sync implementation is now provided by the main `tokio` crate.
Functionality can be opted out of by using the various net related
feature flags.
A step towards collapsing Tokio sub crates into a single `tokio`
crate (#1318).
The executor implementation is now provided by the main `tokio` crate.
Functionality can be opted out of by using the various net related
feature flags.
## Motivation
The `tokio_net::driver` module currently stores the state associated
with scheduled IO resources in a `Slab` implementation from the `slab`
crate. Because inserting items into and removing items from `slab::Slab`
requires mutable access, the slab must be placed within a `RwLock`. This
has the potential to be a performance bottleneck especially in the context of
the work-stealing scheduler where tasks and the reactor are often located on
the same thread.
`tokio-net` currently reimplements the `ShardedRwLock` type from
`crossbeam` on top of `parking_lot`'s `RwLock` in an attempt to squeeze
as much performance as possible out of the read-write lock around the
slab. This introduces several dependencies that are not used elsewhere.
## Solution
This branch replaces the `RwLock<Slab>` with a lock-free sharded slab
implementation.
The sharded slab is based on the concept of _free list sharding_
described by Leijen, Zorn, and de Moura in [_Mimalloc: Free List
Sharding in Action_][mimalloc], which describes the implementation of a
concurrent memory allocator. In this approach, the slab is sharded so
that each thread has its own thread-local list of slab _pages_. Objects
are always inserted into the local slab of the thread where the
insertion is performed. Therefore, the insert operation needs not be
synchronized.
However, since objects can be _removed_ from the slab by threads other
than the one on which they were inserted, removal operations can still
occur concurrently. Therefore, Leijen et al. introduce a concept of
_local_ and _global_ free lists. When an object is removed on the same
thread it was originally inserted on, it is placed on the local free
list; if it is removed on another thread, it goes on the global free
list for the heap of the thread from which it originated. To find a free
slot to insert into, the local free list is used first; if it is empty,
the entire global free list is popped onto the local free list. Since
the local free list is only ever accessed by the thread it belongs to,
it does not require synchronization at all, and because the global free
list is popped from infrequently, the cost of synchronization has a
reduced impact. A majority of insertions can occur without any
synchronization at all; and removals only require synchronization when
an object has left its parent thread.
The sharded slab was initially implemented in a separate crate (soon to
be released), vendored in-tree to decrease `tokio-net`'s dependencies.
Some code from the original implementation was removed or simplified,
since it is only necessary to support `tokio-net`'s use case, rather
than to provide a fully generic implementation.
[mimalloc]: https://www.microsoft.com/en-us/research/uploads/prod/2019/06/mimalloc-tr-v1.pdf
## Performance
These graphs were produced by out-of-tree `criterion` benchmarks of the
sharded slab implementation.
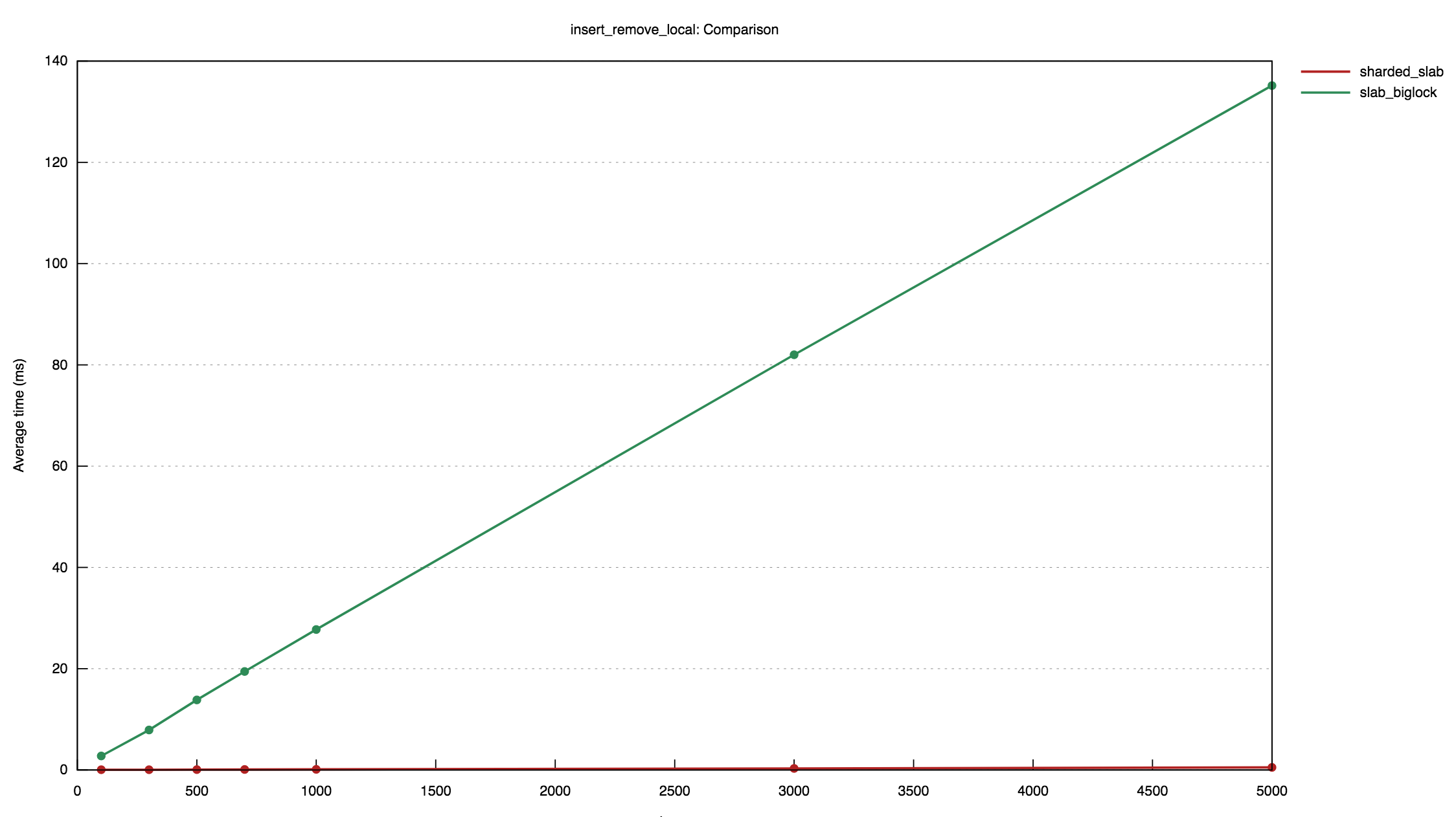
The first shows the results of a benchmark where an increasing number of
items are inserted and then removed into a slab concurrently by five
threads. It compares the performance of the sharded slab implementation
with a `RwLock<slab::Slab>`:
<img width="1124" alt="Screen Shot 2019-10-01 at 5 09 49 PM" src="https://user-images.githubusercontent.com/2796466/66078398-cd6c9f80-e516-11e9-9923-0ed6292e8498.png">
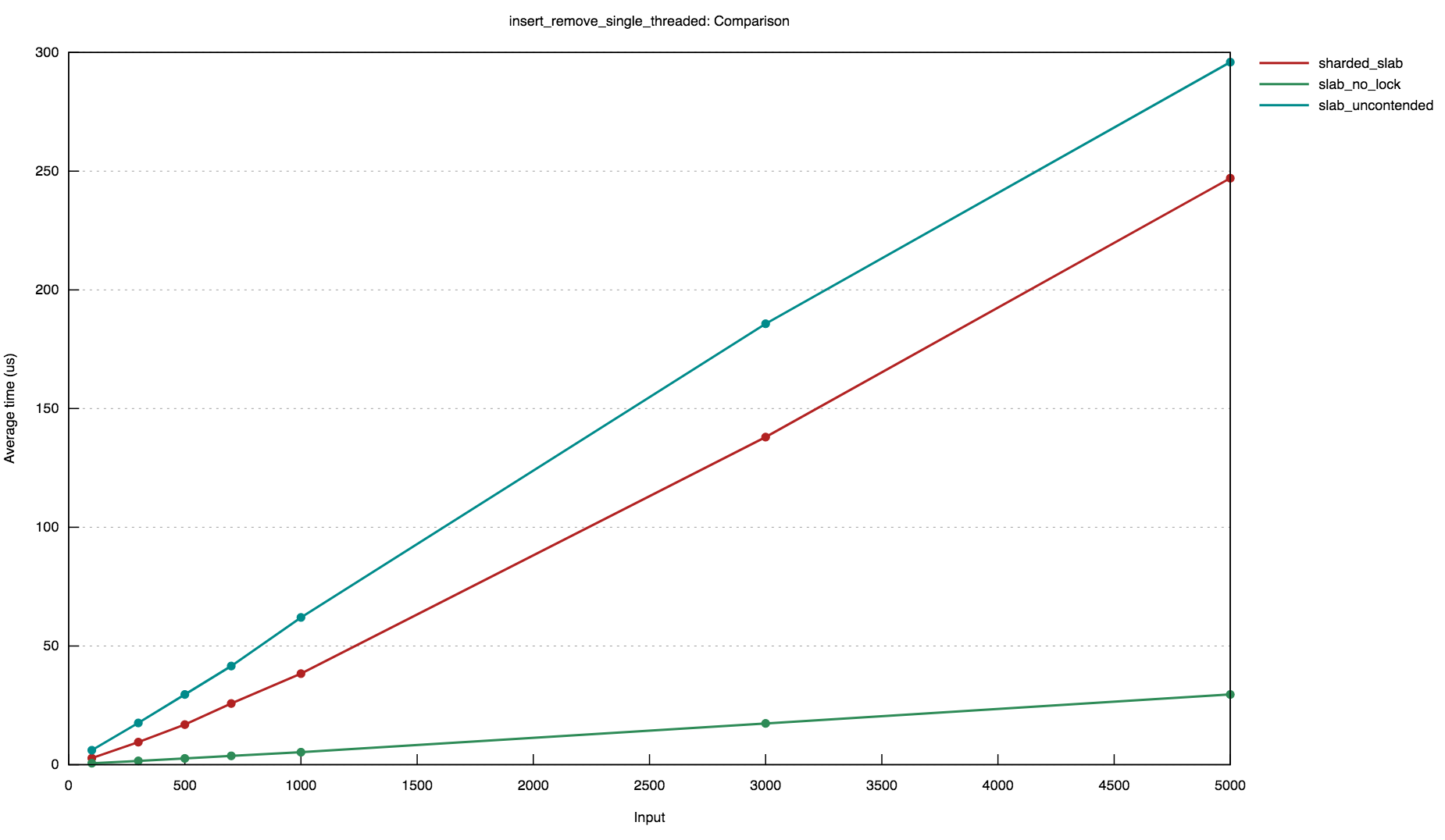
The second graph shows the results of a benchmark where an increasing
number of items are inserted and then removed by a _single_ thread. It
compares the performance of the sharded slab implementation with an
`RwLock<slab::Slab>` and a `mut slab::Slab`.
<img width="925" alt="Screen Shot 2019-10-01 at 5 13 45 PM" src="https://user-images.githubusercontent.com/2796466/66078469-f0974f00-e516-11e9-95b5-f65f0aa7e494.png">
Note that while the `mut slab::Slab` (i.e. no read-write lock) is
(unsurprisingly) faster than the sharded slab in the single-threaded
benchmark, the sharded slab outperforms the un-contended
`RwLock<slab::Slab>`. This case, where the lock is uncontended and only
accessed from a single thread, represents the best case for the current
use of `slab` in `tokio-net`, since the lock cannot be conditionally
removed in the single-threaded case.
These benchmarks demonstrate that, while the sharded approach introduces
a small constant-factor overhead, it offers significantly better
performance across concurrent accesses.
## Notes
This branch removes the following dependencies `tokio-net`:
- `parking_lot`
- `num_cpus`
- `crossbeam_util`
- `slab`
This branch adds the following dev-dependencies:
- `proptest`
- `loom`
Note that these dev dependencies were used to implement tests for the
sharded-slab crate out-of-tree, and were necessary in order to vendor
the existing tests. Alternatively, since the implementation is tested
externally, we _could_ remove these tests in order to avoid picking up
dev-dependencies. However, this means that we should try to ensure that
`tokio-net`'s vendored implementation doesn't diverge significantly from
upstream's, since it would be missing a majority of its tests.
Signed-off-by: Eliza Weisman <eliza@buoyant.io>
This adds an extra spawned task during the thread-pool shutdown loom
test. This results in additional cases being tested, primarily tasks
being stolen.
{kind=link}
{kind=link}